3D ACQUISITION AND STEREO VISION
Work by Patrice Delmas and Georgy Gimel’farb
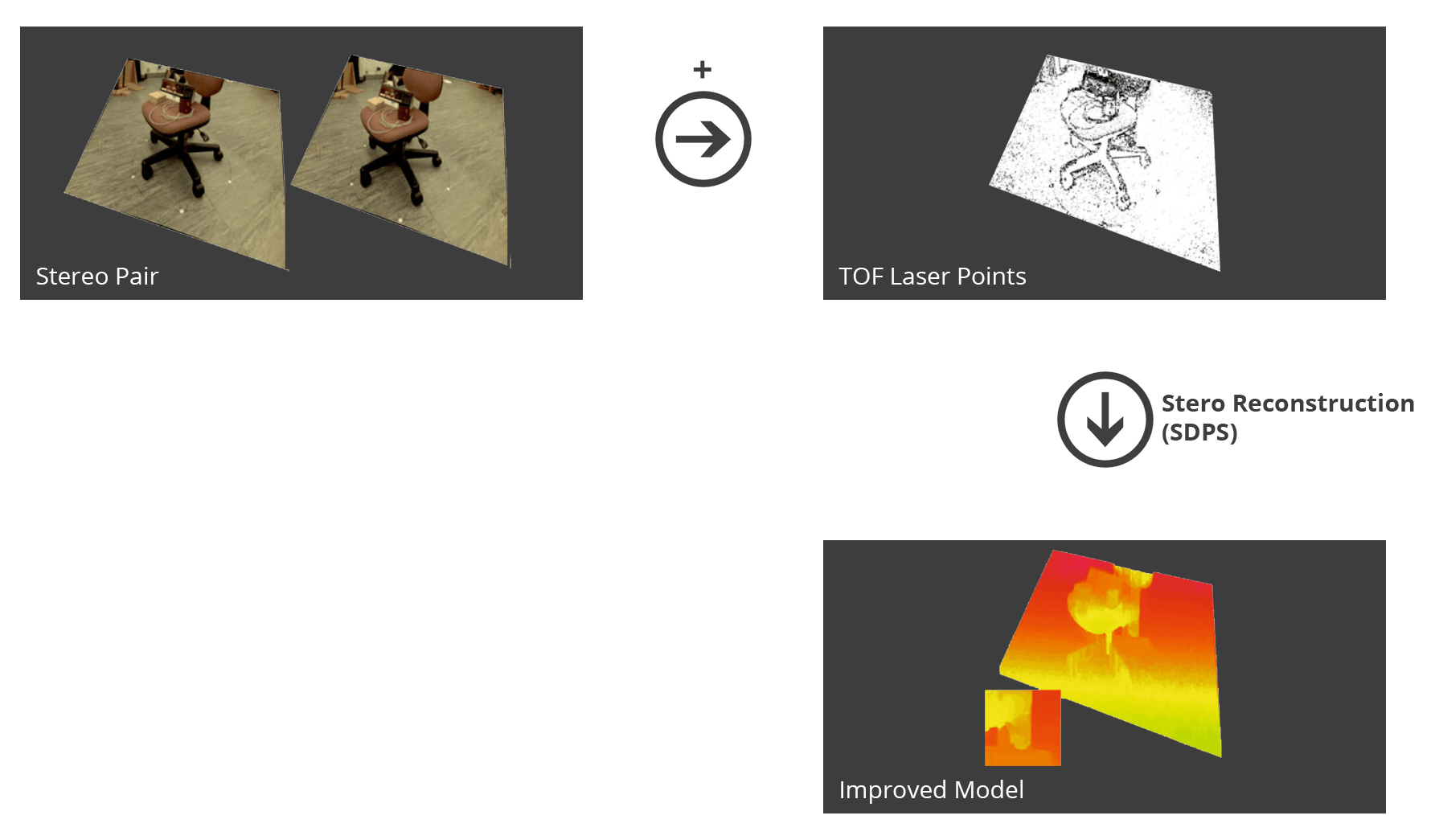
To obtain an accurate model using time-of-flight laser scene-scanners the measurement errors resulting e.g. in gaps, uncertain edges and small details have to be detected and corrected. Possibility of using multiple calibrated scene images collected simultaneously with the range data for getting a more complete and accurate scene model. Experiments show that the proposed approach eliminates a number of range errors while still may fail on intricate disjoint surfaces that can be met in practice.