ROBOTIC DRIVERS
Autonomous vehicles can reduce costs and risk to human life and increase testing accuracy
Work by Karl Stol

What are they?
Researchers are breaking new ground in this area – researching vehicle following, which has applications in automated highways, transportation convoys, harvesting, and cruise control systems. They’re aiming to achieve accurate and autonomous steering and spacing control for vehicle following, using a robotic driver developed over several years at the University.
How does it work?
An existing robotic driver is used to control a standard passenger vehicle such that no modifications to the car are necessary. To construct an accurate following, only information about the relative position of the lead vehicle and the motion of the following vehicle is required. A laser scanner detects the lead vehicle and the following vehicle’s ego-motion is sensed using an IMU and wheel encoder. An algorithm was developed and tested to locate the lead vehicle. Several controllers were tested in simulation and experimentally. The best controller had a RMS lateral deviation of 37cm from the path of the lead. A new trajectory based spacing controller was simulated, allowing the following vehicle to reproduce the velocity of the lead.
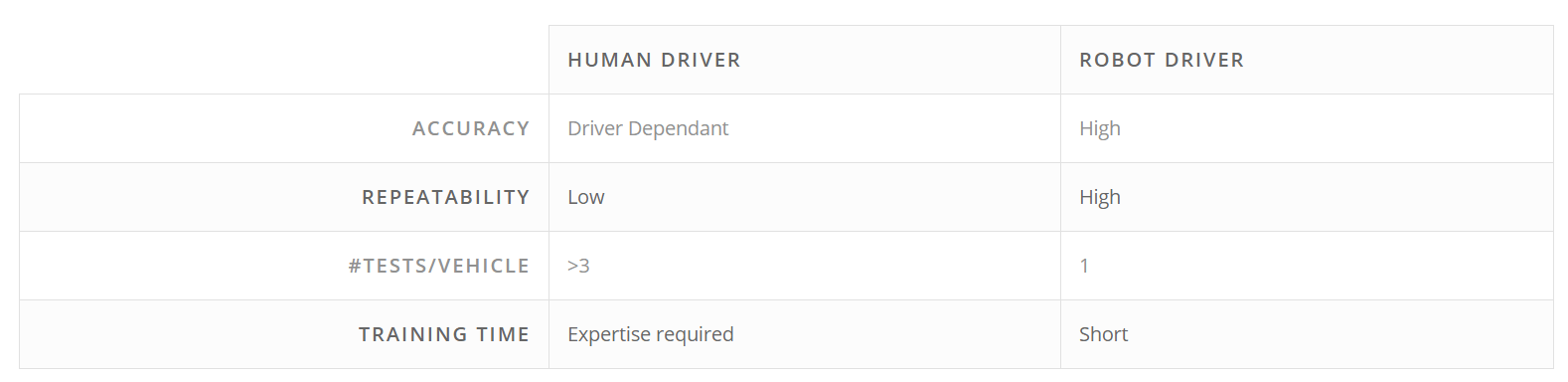
Driver Testing
Rising environmental awareness and consequential tougher emission regulations have increased the pressure on vehicle dynamometer testing facilities. Testing requires the vehicle to follow a drive cycle (desired speed-time profile) that represents real driving conditions but those cycles vary. The Dynamics and Control Group is developing a robotic driver to successfully complete a standard drive cycle and produce repeatable results that are compatible on a variety of vehicles and designed for a short setup time.